- Главная
- Авиация и космонавтика
- Административное право
- Акционерное право
- Английский
- Антикризисный менеджмент
- Биографии
- Автомобильное хозяйство
- Автотранспорт
- Культура и искусство
- Маркетинг
- Международное публичное право
- Международное частное право
- Международные отношения
- Менеджмент
- Металлургия
- Муниципальное право
- Налогообложение
- Оккультизм и уфология
- Педагогика
- Политология
- Право
- Предпринимательство
- Психология
- Радиоэлектроника
- Риторика
- Социология
- Статистика
- Страхование
- Строительство
- Схемотехника
- Таможенная система
- Теория государства и права
- Теория организации
- Теплотехника
- Технологии
- Товароведение
- Транспорт
- Трудовое право
- Туризм
- Уголовное право и процесс
- Управление
- Сочинения по литературе и русскому языку
- Другое
Курсовая работа: Информационно-измерительная системаКурсовая работа: Информационно-измерительная системаМинистерство образования Российской Федерации УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КАФЕДРА РТС "ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА" КУРСОВАЯ РАБОТА ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Екатеринбург 2007 Техническое задание Перечень используемых сокращений Введение Основная часть Расчет параметров радиотехнической системы 1. Расчет параметров преобразования сообщения в цифровую форму 1.1 Случай №1 1.2 Случай №2 1.3 Случай №3 2. Расчет и выбор параметров для радиолинии передачи информации с объекта 2.1 Определение параметров системы с ВРК и АМН 2.2 Расчет энергетических характеристик 3. Организация синхронизации 4. Расчет параметров радиолинии «ЦП – объект» 5. Выбор характеристик системы определения координат объекта 6. Описание структурной схемы центральной станции 7. Описание структурной схемы объекта Заключение Библиографический список Приложение №1. Структурная схема центральной станции Приложение №2. Структурная схема объекта Исходные данные: 1. Параметры преобразования сообщения: a) среднеквадратическое (эффективное) значение сообщения X, В 0,5; b)
плотность
распределения: c)
нормированная
величина: d)
параметр
распределения: e)
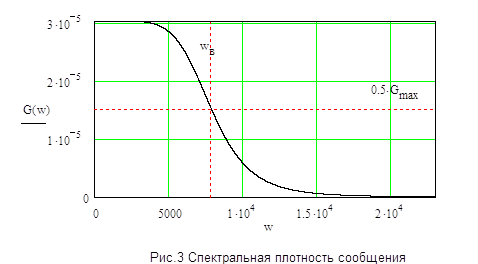
спектральная
плотность распределения: G(w)= f) Число k: 3 g) суммарная относительная среднеквадратическая ошибка входных преобразований: 0.05; 2. Параметры радиолинии передачи информации с объекта: a) вид модуляции АМн; b)
число
сигналов c)
число
каналов d)
число
служебных канальных промежутков в кадре e)
надежность
передачи информации f) допустимая вероятность ошибки на один разряд цифрового сообщения:
g)
время
передачи сообщения 3. Параметры радиолинии измерения координат объекта: a) расположение: центральный пункт наземный, объект наземный; b) максимальное расстояние до объекта: Rmax=30 км; c)
вероятность
ложной тревоги: d) рабочая длина волны: λ=0.2 м; e) измеряемые параметры: R, a 4. Константы: a)
скорость
света b)
постоянная
Больцмана Выбрать и рассчитать: 1. Частоту дискретизации Fд и Fв, а также Fэ; 2. Шаг (интервал) квантования сообщения h; 3. Максимальное отклонение сообщения от среднего значения хm и пик-фактор Пх; 4. Число разрядов двоичного кода n; 5. Число уровней квантования m; 6. Длительность канального сигнала Тк; 7. Длительность разрядного импульса tn; 8. Структуру информационного пакета со служебными сигналами 9. Полосу частот группового сигнала Dfå; 10. Параметры модуляции сигнала во второй ступени; 11. Полосу частот радиолинии Dfрл; 12. Спектральную плотность шумов N0, приведенных ко входу приемника; 13. Пороговое отношение мощности сигнала к мощности шума qпор2, обеспечивающее заданное значение допустимой вероятности ошибки РД (1/бит); 14. Рабочее отношение мощности сигнала к мощности шума q2раб, обеспечивающее заданную надежность передачи информации РН; 15. Основные параметры приемной и передающей антенн: коэффициенты полезного и направленного действия, значения ширины диаграммы направленности каждой из них; 16. Пиковую и среднюю мощность излучаемого сигнала; 17. Вероятность ошибки приема (выделения) кодовой комбинации при допустимой вероятности ошибки выделения разрядного импульса РД; 18. Эффективное значение результирующей относительной ошибки сообщения на выходе системы с учетом действия шумовой помехи; 19. Параметры канала управления, способ его организации, протокол взаимодействия. Перечень используемых сокращений АМ – амплитудная модуляция; ВРК – временное разделение каналов; ДН – диаграмма направленности; АМн – амплитудная манипуляция; КИ – канальный интервал; КИМ – кодовая импульсная модуляция; КНД – коэффициент направленного действия; ОБП – одна боковая полоса; РЛС – радиолокационная станция; СПИ – система передачи информации; ТЗ – техническое задание; УДС – угломерно-дальномерная система; ФАР – фазированная антенная решетка; ЦП – центральный пункт. Объектом курсовой работы является радиоэлектронная система передачи непрерывных сообщений по цифровым каналам. В качестве источников сообщений предусматривается совокупность процессов, характеризующих состояние некоторой испытуемой системы, не допускающей иного наблюдения, кроме использования радиотелеметрии. Таким образом, задание предусматривает выполнение работы, состоящей из двух основных частей – расчета параметров цифровой радиотелеметрической системы и формирование её детальной структурной схемы. Комплекс подлежащих передаче сообщений является совокупностью непрерывных, независимых процессов, каждый из которых характеризуется видом спектральной плотности мощности (функции корреляции) и одномерной плотностью вероятности мгновенных значений. Указанные характеристики необходимы для расчета параметров входных преобразований по заданному значению эффективной относительной ошибки преобразований, включающей в себя ошибку временной дискретизации, ошибку, вызванную ограничением динамического диапазона, и ошибку квантования. При фиксировании значения результирующей относительной среднеквадратичной ошибки (с.к.о.) входных преобразований, уровня ограничения входного преобразователя сообщения и параметров сообщения определяется частота временной дискретизации, число разрядов и другие сопутствующие параметры преобразования аналогового процесса в дискретную форму. В дальнейшем ищутся характеристики канального сигнала с учетом того, что в рассматриваемых системах применяется только временное разделение каналов при использовании как кодово-импульсной или дельта–модуляции с последовательной или параллельной передачей разрядных сигналов, так и квантованной время–импульс модуляции. Определив длительность канального интервала с учетом необходимости надежной кадровой, канальной и разрядной синхронизации, а также ширину спектра группового сигнала по заданной полосе частот, выделенной для радиолинии с учетом вида и параметров второй ступени модуляции, находится возможное число каналов. Последним этапом является определение требуемой мощности сигнала на входе приемника и мощности излучаемого сигнала на передающей стороне по допустимым значениям вероятности ошибки воспроизведения символа дискретного сообщения и надежности связи. В целом выбор ряда технических решений – защитных промежутков по времени и частоте, способов синхронизации, параметров и конструкции антенн – должен учитывать необходимость экономии полосы частот, мощности передатчика и, по возможности, стоимости отдельных элементов, определяющих стоимость производства и эксплуатации системы в целом. Основная часть Расчет параметров радиотехнической системы1. Расчет параметров преобразования сообщения в цифровую формуОдним из важнейших вопросов при разработке систем передачи информации с временным разделением каналов является выбор частоты дискретизации сообщений [1], [2]. Основой для её расчёта является равенство (1.1) относительной с.к.о. дискретизации. При этом частота дискретизации определяет ошибку дискретизации, включающую в себя ошибку ограничения спектра сообщения, и ошибку интерполяции при характеристиках формирующего и интерполирующего фильтров близких к идеальному ФНЧ. Таким образом, необходимо выбрать соотношение между тремя слагаемыми равенства (1.2), задавшись значением каждого из них при необходимом значении суммы их квадратов dвх. При различном соотношениями между слагаемыми равенства (1.2), можно получить набор значений частоты дискретизации FД, относительного уровня ограничения мгновенных значений Н сообщения (пик-фактора) и числа разрядов n. Поэтому необходимо сравнить несколько вариантов разбиений då, и остановиться на одном из вариантов, обеспечивающем наибольшую длительность импульсов двоичного кода tn–целевая функция. При определении частоты дискретизации необходимо исходить из эффективного значения относительной ошибки дискретизации:
Эффективное значение результирующей относительной ошибки сообщения на входе системы: d2вх=d2д +d2кв +d2огр (1.2) Для расчета оставшихся параметров–числа разрядов n и пик-фактора сообщения Н – необходимо использовать формулы:
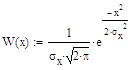
где xм – максимально возможное значение сообщения после его прохождения через амплитудный ограничитель мгновенных значения сообщения. Равенства (1.3) – (1.5) справедливы при симметричной форме плотности вероятности сообщения относительно математического ожидания В этой части необходимо выбрать и рассчитать параметры преобразования аналогового сообщения в цифровой первичный сигнал (двоичный код) для передачи в информационном канале системы измерения и сбора информации. Сообщение представлено в виде реализации случайного стационарного процесса, заданного плотностью распределения своих мгновенных значений W(x) и спектральной плотностью G(w) и подвергается преобразованию в цифровой сигнал с заданной суммарной ошибкой преобразования dS.
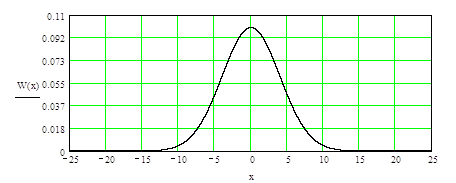
Рис. 1. Нормированная плотность распределения мгновенных значений. Перейдем к другой переменной (зависимости от самой величины х, а не от нормированного значения y):
Рис. 2. Нормированная плотность распределения мгновенных значений. Математическое ожидание величины х равно [2]:
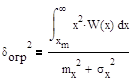
Расчет рекомендуется провести, по крайней мере, для трех вариантов распределения между составляющими суммарной ошибки и выбрать параметры, обеспечивающие большую длительность t0 [5]. 1.1 Случай №1 Рассмотрим вариант, когда δд2 = δкв2= δогр2= δS2/3, то есть значения ошибок дискретизации, квантования и ограничения равны
где δS2=0,05 Максимальное
отклонение сообщения от среднего значения
решая которое, находим числовое значение искомой величины
Проверим
правильность выбора
Пик-фактор сообщения вычисляем по формуле [5]:
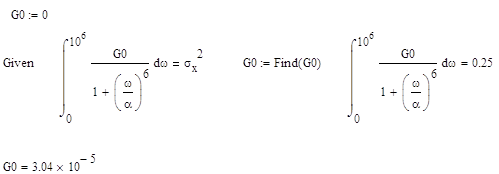
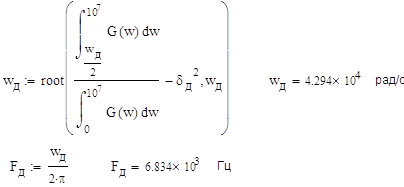
Верхняя частота спектра определяется из трех условий [5]: а) как
частота соответствующая Вычисляем значение верхней частоты из следующего уравнения:
Найдем G0:
Затем определим максимальное значение спектральной плотности:
Тогда
Значение верхней частоты в Гц.
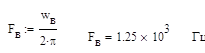
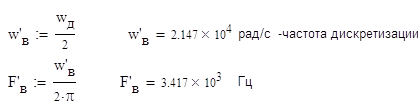
б) как
эквивалентная полоса частот
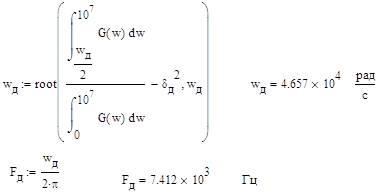
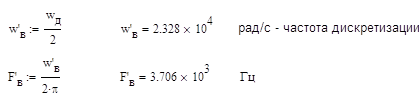
в) как
частота Частоту
Тогда
Вид спектральной плотности сообщения представлен на рисунке 3.
Вычисляем шаг квантования исходя из заданной ошибки квантования:
Число уровней квантования находим по формуле:
Число разрядов двоичного кода сообщения:
Период дискретизации:
Длительность канального сигнала:
где число каналов Nкан=8, а число служебных канальных промежутков в кадре Nс>1, примем Nс=2. Длительность разрядного импульса многоканального сигнала:
1.2 Случай №2 Рассмотрим вариант, когда δд2=0,5 δS2, δкв2=0,2 δS2, δогр2= 0,3δS2,
где δS2=0,05. Максимальное
отклонение сообщения от среднего значения
решая которое, находим числовое значение искомой величины
Проверим правильность
выбора
Пик-фактор сообщения вычисляем по формуле [5]:
Верхняя частота спектра определяется из трех условий [5]: а) как
частота соответствующая Вычисляем значение верхней частоты из следующего уравнения:
Найдем G0:
Затем определим максимальное значение спектральной плотности:
Тогда
Значение верхней частоты в Гц.
б) как
эквивалентная полоса частот
в) как
частота Частоту
Тогда
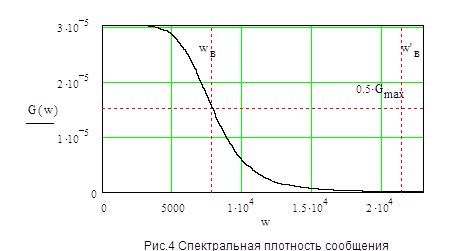
Вид спектральной плотности сообщения представлен на рисунке 4.
Вычисляем шаг квантования исходя из заданной ошибки квантования:
Число уровней квантования находим по формуле:
Число разрядов двоичного кода сообщения:
Период дискретизации:
Длительность канального сигнала:
где число каналов Nкан=8, а число служебных канальных промежутков в кадре Nс>1, примем Nс=2. Длительность разрядного импульса многоканального сигнала:
1.3 Случай №3 Рассмотрим вариант, когда
где δS2=0,05 Максимальное
отклонение сообщения от среднего значения
решая которое, находим числовое значение искомой величины
Проверим
правильность выбора
Пик-фактор сообщения вычисляем по формуле [5]:
Верхняя частота спектра определяется из трех условий [5]: а) как
частота соответствующая Вычисляем значение верхней частоты из следующего уравнения:
Найдем G0:
Затем определим максимальное значение спектральной плотности:
Тогда
Значение верхней частоты в Гц.
б) как
эквивалентная полоса частот
в) как
частота Частоту
Тогда частота дискретизации:
Верхняя частота спектра:
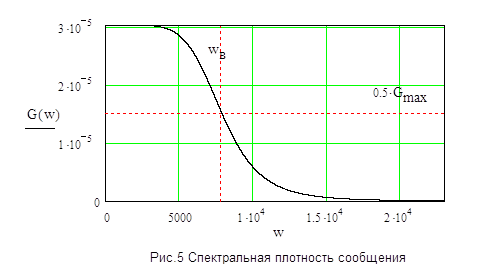
Вид спектральной плотности сообщения представлен на рисунке 5.
Вычисляем шаг квантования исходя из заданной ошибки квантования:
Число уровней квантования находим по формуле:
Число разрядов двоичного кода сообщения:
Период дискретизации:
Длительность канального сигнала:
где число каналов Nкан=8, а число служебных канальных промежутков в кадре Nс>1, примем Nс=2. Длительность разрядного импульса многоканального сигнала:
Проведя аналогичные вычисления для трех вариантов распределения ошибок, заполним сводную таблицу: Таблица 1
В таблице ошибки заданы процентах (%) от суммарной ошибки. Как видно, наибольшая длительность разрядного импульса t0 обеспечивается во втором случае. Вероятность
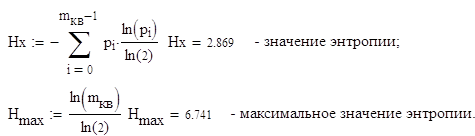
попадания сообщения в i‑й интервал Вычислим значение энтропии сообщения [3]:
При большом пик-факторе Пх>3 и большом значении числа разрядов кода n>6 рекомендуется применять компрессию динамического диапазона сообщения, используя нелинейный функциональный преобразователь мгновенных значений сообщения, который также обеспечивает неравномерное квантование исходного сообщения. Для сообщений, плотность вероятности которых W(x) содержит экспоненциальные функции, часто применяется логарифмический преобразователь с коэффициентом сжатия, определяемым как Кс=(hm/h) ³ Пх где hm–максимальное, а h‑минимальное значение шага квантования нелинейного преобразователя. При одинаковой ошибке требуемое число уровней квантования для этих преобразователей соотносится как
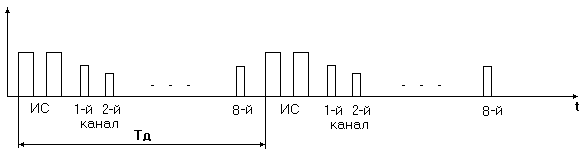
где М число уровней нелинейного квантователя. Применение компрессии особенно выгодно в групповом тракте систем с ВРК при разбросе эффективных уровней сообщений т.е.после коммутатора каналов. В этом случае число разрядов у нелинейного двоичного кодера на 1–2 разряда меньше, чем у равномерного кодера при одинаковых характеристиках [7].Для получения линейной характеристики всего тракта передачи необходимо иметь на приёмной стороне устройство с обратным компрессору законом преобразования – экспандер. 2. Расчет и выбор параметров для радиолинии передачи информации с объекта Непрерывные сообщения, преобразованные в цифровую форму (код), передаются пакетом в течение 20 секунд по многоканальной радиолинии после обнаружения объекта. Число каналов системы N=8, а вид модуляции – АМн. Предполагается реализация принципа временного разделения каналов и разрядов цифрового сообщения. При этом структура пакета, помимо информационных сигналов, должна содержать служебную информацию для систем синхронизации и разделения разрядов и кодов для приемника на Ц.П. В этой части курсовой работы определяются параметры цифрового потока: разрядность (n), длительность канального интервала Тк, длительность тактового (разрядного) импульса, требуемая полоса частот радиолинии fрл с учётом особенностей АМн модуляции, ёмкость запоминающего устройства (З.У.) на Ц.П. для однократного сеанса связи, скорость передачи цифрового потока, скорость модуляции. 2.1 Определение параметров системы с ВРК и АМН При расчете параметров радиотехнической системы (длительности канального сигнала и длительности разрядного импульса) подразумевалось, что вся информация (вместе с признаками синхронизации) передается со скоростью преобразования сообщения в цифровую форму (с частотой дискретизации). Длительность временного интервала, отводимого на передачу одного разряда, вычислялась исходя из того, что за один канальный интервал передается 7 информационных разрядов. На рисунке ниже приведена структура информационной посылки.
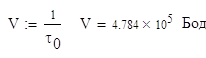
Рис. 3. Временная диаграмма информационной посылки. Скорость передачи одного разряда информации:
Так как импульсы синхронизации (ИС) не несут информации, то скорость передачи полезной информации равна:
Для однократного сеанса связи достаточно 8‑ми разрядного ОЗУ. Емкость ЗУ, которая обеспечит хранение информации, принятой с объекта в течение 20с, т.е. за один сеанс связи
При
формировании канальных сигналов необходимо учесть, что для уменьшения
межсимвольных (при последовательной передаче разрядов) искажений длительности
разрядных импульсов должны быть меньше
Полоса группового сигнала определяется из следующего выражения [5]:
Где gк=1 коэффициент, определяемый видом манипуляции сигнала в канале (КИМ-АМн). Для передачи информации используем перенос на несущую частоту с помощью ОБП (т.е. во второй ступени используется амплитудная модуляция), тогда требуемая полоса радиолинии составит:
где 2.2 Расчет энергетических характеристик К энергетическим характеристикам относятся: мощность сигнала на входе приемника, мощность излучаемого сигнала, а также мощность шума, приведенная ко входу приемника. Качество выделения информации приемным устройством цифровой системы передачи информации обычно характеризуется вероятностью ошибки выделение символы сообщения. Связь между допустимым значением вероятности ошибки Рд, равным 1*10-5 и пороговым отношением мощности сигнала к мощности шума q2пор для АМн модуляции при некогерентном приеме может быть представлена в виде [4, 5]:
Откуда
Рабочее отношение мощности сигнала к мощности шума, обеспечивающее заданную надежность Рн =0,8, находим из выражения:
Откуда
Квадраты этих отношений:
Считаем, что полоса пропускания линейной части приемника на 10% превышает полосу частот радиолинии:
Мощность шума Рш может быть найдена из выражения:
k0 = 1,38.10-23 Дж/град – постоянная Больцмана; Тэф=Тк+ТЗ+ТА+Тпр – эффективная шумовая температура приемника, складывающаяся из температуры космоса (небесной сферы), атмосферы, земли и эффективной шумовой температуры приемника, обусловленной шумами входных цепей и первых каскадов. Первые три слагаемых для Тэф образуют эффективную шумовую температуру антенны. Сведения о значениях отдельных компонент эффективной шумовой температуры приемника в зависимости от несущей частоты при различных схемных решениях входных каскадов приемного устройства приведена на рисунке. Выбрав конкретное значение Тэф, можно найти мощность шума, полагая полосу пропускания приемника? fпр несколько превышающей (примерно на 5–10%) ширину спектра радиосигнала. Умножая полученное значение мощности шума на значения порогового h2пор и рабочего h2раб отношений сигнал /шум, можно получить соответственно пороговую и рабочую мощности сигнала на входе приемника. Эффективную шумовую температуру приемника находим для частоты 6 ГГц (считаем, что приемник выполнен на полупроводниках):
Спектральная
плотность шумов
Мощность шумов, приведенная к входу приемника
Считаем, что
сопротивление антенны приемника равно 75 Ом, тогда мощность на входе будет
равна Умножая полученное значение мощности шума на значения порогового и рабочего отношений сигнал /шум, можно получить соответственно пороговую и рабочую мощности сигнала на входе приемника [5]:
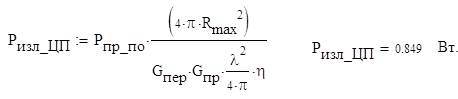
Для расчета требуемой мощности излучаемого сигнала необходимо воспользоваться соотношением между мощностями излучаемого и принимаемого сигналов при распространении радиоволн в свободном пространстве [1], [2]:
где GA – коэффициент направленного действия передающей антенны; Sэф – эффективная поверхность приемной антенны; Рпр – мощность сигнала на входе приемника; η – коэффициент потерь энергии сигнала при распространении радиоволн и в антенно-фидерных трактах приемника и передатчика (η<1). Задаваясь характеристиками антенн и коэффициентом потерь энергии при заданном максимальном расстоянии до объекта, найдем рабочее значение мощности передатчика при использовании рабочей мощности сигнала на входе приемника. Будем считать, что на объекте установлена ненаправленная антенна с КНД
Имеем радиолинию с активным ответом, которая состоит из линии запроса и линии ответа. КНД антенны, установленной на ЦП выберем, исходя из заданного разрешения, которое составляет 1% от максимально измеряемого угла. КНД антенны будет равен 10, так как антенна представляет из себя простую ФАР на 4–6 элементах. Коэффициент
потерь энергии сигнала при распространении радиоволн и в антенно-фидерных
трактах приемника и передатчика: Тогда значение рабочей мощности передатчика на объекте равно [5]:
Это нормированная мощность, т.е. приведенная к 1 Ом. Если считать, что мощность передается антенной с сопротивлением 75 Ом, то, можно считать, что на эквивалентной согласованной нагрузке должна выделяться мощность:
Расчет относительной среднеквадратической ошибки воспроизведения сообщения, вызванной действием шумовой помехи, можно выполнить по формуле [5]:
Тогда эффективное значение результирующей относительной ошибки сообщения на выходе системы с учетом действия шумовой помехи равно:
3. Организация синхронизации Вероятность ошибки приема (выделения) кодовой комбинации из 8 разрядов при допустимой вероятности ошибки выделения разрядного импульса (ошибки приема разрядов независимы) находим из выражения [3, 5]:
В системе организована канальная синхронизация. То есть, в начале каждого цикла передачи информации (первый канальный интервал) передается 2 одинаковых ИС. Кадровое синхрослово по своей структуре должно существенно отличаться от всех возможных кодовых комбинаций, поэтому необходимыми требованиями к синхросигналу являются: энергия больше энергии, передаваемой в информационном канале, а так же чтобы его форма не повторяла форму сигнала [3]. Для выделения ИС в приемнике используется дискретный согласованный фильтр, настроенный на ИС. В него поочередно записываются принимаемые кодовые слова, а в момент превышения выходным напряжением порога выделяется импульс кадровой синхронизации. В начале каждого цикла обмена на приемной стороне запускается тактовый генератор и производится синхронизация. Используя повторяемость ИС, можно, накапливая их, увеличить помехоустойчивость устройства синхронизации [3]. Если по прошествии двух периодов дискретизации не приходит синхропризнак, то система переводится в режим пониженного энергопотребления до появления следующего ИС или окончания связи. Это обеспечивает, в целом, малое потребление системы. Вероятность ошибки синхронизации при такой организации можно определить так:
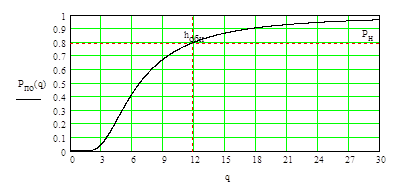
Как видно, эта вероятность ошибки намного меньше, чем вероятность ошибки РД, приходящейся на один информационный разряд. 4. Расчет параметров радиолинии «ЦП – объект» Считаем, что после сеанса связи (если на данном направлении нет больше объектов) система переходит в режим поиска. ЦП излучает гармонический сигнал длительностью ТК, после чего переходит в режим приема и ожидает ответ от объектов. Если ответ получен, то ЦП переходит в режим определения координат объекта. Энергетические соотношения в этом случае определяются вероятностью ложной тревоги F и надежностью связи РН при обнаружении сигнала со случайной амплитудой и фазой. Зависимость вероятности правильного обнаружения от отношения сигнал/шум определяется формулой [4]:
Принимая вероятность правильного обнаружения равной надежности, находим порог обнаружения:
Рис. 4. График зависимости вероятности правильного обнаружения от отношения сигнал/шум Тогда мощность принимаемого сигнала, которая будет обеспечивать выбранное отношение сигнал/шум, равна
Мощность передатчика наземной станции составляет [5]:
5. Выбор характеристик системы определения координат объектаРадиоизмерительная система ЦП осуществляет поиск объектов, их опознавание по ответному сигналу, измерение заданных параметров взаимного расположения ЦП и объекта, прием и хранение информации. Точность измерения и разрешения координат объекта не хуже 1% от максимальной величины измеряемого параметра (угла или дальности), причем угловое или дальномерное разрешение измерителя в зоне поиска позволяет проводить сеанс связи только с одним из объектов. Запросно-ответная радиолиния ЦП–объект обеспечивает, заданную вероятность ложной тревоги F и выбранную вероятность правильного опознавания объекта, равную надежности связи РН [5]. Наиболее часто в РЛС используют последовательный метод обзора, при котором ДН антенны отклоняется в пределах заданного сектора (зоны) обзора. Обеспечение большой дальности действия (при ограничении энергии излучаемого сигнала) и чувствительности приемного устройства, а также повышение угловой разрешающей способности и точности системы возможно лишь за счет сужения ДН, что, в свою очередь, приводит к увеличению времени, необходимого для обзора заданного объема пространства [4]. Тогда, выбрав круговой способ обзора [1, 4], при котором ДН описывает круг, пространство сканирования ограничится координатами:
Движение ДН представляет собой круговое вращение по азимуту Полагаем, что ДН перемещается равномерно, и каждый элемент сектора обзора находится в равных условиях, а для надежного обнаружения и для определения координат цели необходимо принять несколько сигнальных импульсов в пределах ДН, тогда скорость её отклонения должна быть снижена. 6. Описание структурной схемы центральной станции Одноканальная импульсная некогерентная РЛС (радиолокационная система) кругового обзора [4], структурная схема которой представлена в приложении 1, позволяет обнаруживать цели и определять их дальность R и азимут a в пределах зоны обзора, ограниченной максимальной дальностью РЛС Rmax и шириной ДН (диаграммы направленности) в вертикальной плоскости. По азимуту ДН вращается с постоянной скоростью, осуществляя за время одного оборота круговой обзор. Принимаемые отраженные сигналы воспроизводятся на экране электронно-лучевой трубки (ЭЛТ) индикатора кругового обзора (ИКО), развертка которого вращается синхронно с вращением ДН. Момент излучения зондирующего импульса антенной (А) соответствует началу линии развертки дальности, а ее азимутальное положение совпадает с положением оси ДН. Отраженный от цели сигнал после усиления и детектирования в приемнике РЛС модулирует луч ЭЛТ по яркости, подсвечивая точку развертки, соответствующую положению цели. Отраженные сигналы будут приниматься пока цель остается в пределах ширины ДН по азимуту. Устройством, обеспечивающим согласованную во времени работу всех элементов РЛС во времени, является синхронизатор, состоящий из высокостабильного опорного генератора ОГ, колебания которого заданной частоты и формы являются исходными для формирования пусковых импульсов ФПИ с необходимой длительностью и частотой повторения, в том числе импульсов запуска модулятора М и развертки дальности РД. Импульсы модулятора определяют длительность и частоту повторения высокочастотных импульсов, генерируемых генератором высокой частоты ГВЧ. Через антенный переключатель АП, блокирующий вход приемника, высокочастотные колебания поступают на антенну А и излучаются ею в направлении цели. По окончании излучения импульса и восстановления чувствительности приемного тракта РЛС готова к приему отраженных сигналов с помощью той же антенны. Принятый радиосигнал усиливается и детектируется в приемнике РЛС и виде видеоимпульса, усиленного видеоусилителем ВУ в ИКО, поступает на модулирующий электрод ЭЛТ. Радиально-круговая развертка ЭЛТ, применяемая в ИКО, формируется с помощью схем развертки по дальности РД и по азимуту РА. Вращение линии развертки синхронно с вращением ДН достигается с помощью схемы РА, управляемой напряжением от датчика положения антенны ДПА. Вращение ДН осуществляется устройством вращения антенны УВА, которым обычно является электродвигатель с редуктором. Для измерения дальности на экране ИКО формируются метки дальности в виде колец, расстояние между которыми зависит от периода повторения импульсов масштаба, формируемых схемой электронных меток СЭМ. Видеосигналы приемника с помощью устройства первичной обработки информации УПОИ отделяются от помех и после преобразовываются в цифровую форму кодирующим устройством КУ Система приема информации на ЦП имеет стандартную структуру системы выделения информации с ВРК (приложение 1). Сигналы с объекта через антенну поступают в приемное устройство дискретных сообщений (ПрУ), где производится предварительная фильтрация и усиление. Затем в ДМII для детектирования (снятие вторичной модуляции). На выходе ДМ выделяется оценка группового сигнала. Выделенный групповой сигнал подается на селектор синхроимпульсов (ССИ). ССИ может представлять собой, например, интегрирующую цепь (ИЦ) с пороговым устройством на выходе, срабатывающим при действии на входе ИЦ синхроимпульса (ИС). Выделенные ИС поступают на генератор канальных селекторных импульсов (ГКСИ), имеющий Nкан выходов. ГКСИ вырабатывает последовательности канальных импульсов, открывающих соответствующие временные канальные селекторы (КСi), представляющие собой схемы «И». Канальные сигналы поступают на канальные демодуляторы (КДМi), где снимается первичная модуляция. На выходе КД формируются оценки переданных сообщений (снимается первичная модуляция), поступающие к получателям (Пi) [2, 3]. Для приема данных приемник ЦП должен иметь системы ФАПЧ и БАРУ. Обращение к объекту осуществляется с помощью адреса. 7. Описание структурной схемы объектаСистема сбора и передачи информации согласно ТЗ имеет структуру системы с ВРК (приложение 2). Аналоговый сигнал с датчиков через фильтр и усилитель согласующего устройства поступает на АЦП, где преобразуется в цифровой код. Ритм работы системы задается высокостабильным генератором тактовых импульсов (ГТИ). Тактовые импульсы поступают на генератор канальных импульсов (ГКИ), имеющий Nкан+1 выходов, где Nкан – число каналов. Канальные импульсы поступают соответственно на канальные модуляторы (КМi), где модулируются сообщениями, поступающими с коммутатора, а также на генератор синхронизирующих импульсов (ГСИ). На выходах КМ формируются модулированные канальные сигналы (первая ступень модуляции КвАМн). Параметры модуляции выбраны так, чтобы импульсы различных модулированных канальных сигналов (КС) не перекрывались. КС подаются на линейный сумматор (S) одновременно с последовательностью ИС, вырабатываемых ГСИ, которые необходимы для синхронизации работы приемной части. На выходе сумматора образуется групповой сигнал, состоящий из последовательности ИС и модулированных канальных импульсов. Групповой сигнал поступает на модулятор второй ступени (ОМ) и модулирует по амлитуде высокочастотную несущую (ОБП), вырабатываемую передатчиком (Прд). Библиографический список1. Бакулев П.А., Сосновский А.А Радиолокационные и радионавигационные системы: Учебное пособие для вузов. М.: Радио и связь, 1994. 296 с. 2. Пенин П.И., Филиппов Л.И. Системы передачи цифровой информации: Учебное пособие для вузов. М.: Сов. Радио, 1984. 256 с. 3. Радиотехнические системы передачи информации: Учеб. пособие для вузов/ Под ред. В.В. Калмыкова. М.: Радио и связь, 1990. 304 с. 4. Радиотехнические системы: Учеб. пособие для вузов/ Под ред. Ю.М. Казаринова. М.: Высшая школа, 1990.496 с. 5. Белых Д.П. Методические указания к выполнению курсовой работы. Екатеринбург: УГТУ-УПИ, 2000. 32 с. |

 ; Fд/2=Fв (1.1)
; Fд/2=Fв (1.1)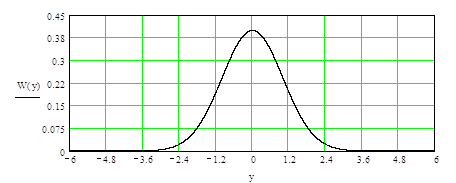
 ;
;  ;
;  ;
; .
. ,
,




 .
. .
.




 .
. ,
,




 ,
, 
 ,
,